Mathematicians Just Found a Hidden ‘Reset Button’ That Can Undo Any Rotation
If you twist something — say, spin a top or rotate a robot’s arm — and want it to return to its exact starting point, intuition says you’d need to undo every twist one by one. But mathematicians Jean-Pierre Eckmann from the University of Geneva and Tsvi Tlusty from the Ulsan National Institute of Science and Technology (UNIST) have found a surprising shortcut. As they describe in a new study, nearly any sequence of rotations can be perfectly undone by scaling its size and repeating it twice.
Like a mathematical Ctrl+Z, this trick sends nearly any rotating object back to where it began.
“It is actually a property of almost any object that rotates, like a spin or a qubit or a gyroscope or a robotic arm,” Tlusty told New Scientist. “If [objects] go through a highly convoluted path in space, just by scaling all the rotation angles by the same factor and repeating this complicated trajectory twice, they just return to the origin.”
A Hidden Symmetry of Motion
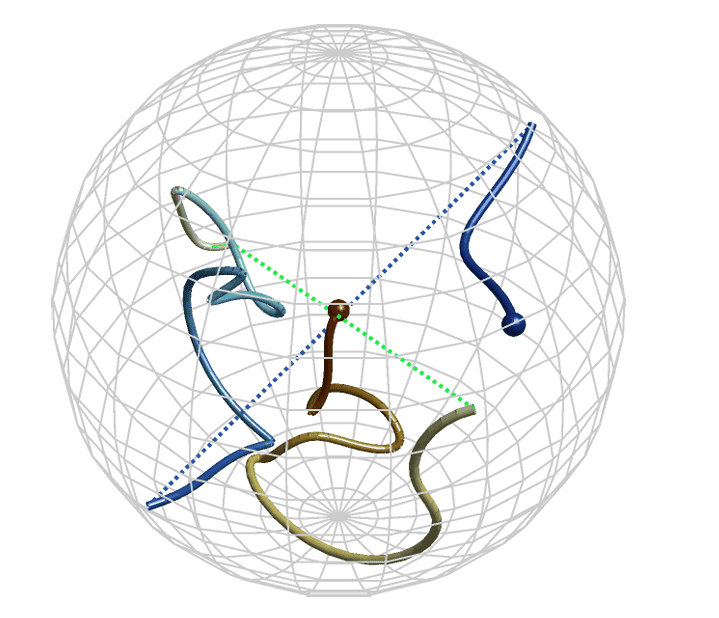
Mathematicians represent rotations using a space called SO(3) — a three-dimensional map where every point corresponds to a unique orientation. At the very center lies the identity rotation: the object’s original state. Normally, retracing a complex path through this space wouldn’t bring you back to that center. But Eckmann and Tlusty found that scaling all rotation angles by a single factor before repeating the motion twice acts like a geometric reset.
So for example:
- If your first rotation sequence tilted the object 75 degrees this way, 20 degrees that way, and so on, you could shrink all those angles by, say, a factor of 0.3, and then run that shortened version two times in a row.
- After those two runs, the object returns perfectly to its starting position — as if nothing had ever happened.
In their proof, the researchers blended a 19th-century tool for combining rotations (Rodrigues’ rotation formula) with Hermann Minkowski’s theorem from number theory. Together, these revealed that “almost every walk in SO(3) or SU(2), even a very complicated one, will preferentially return to the origin simply by traversing the walk twice in a row and uniformly scaling all rotation angles.”
Why This Matters
Why should you care, though? Well, rotations are everywhere: in gyroscopes, MRI machines, and quantum computers. Any technique that can reliably “reset” them could have broad uses. In magnetic resonance imaging (MRI), for example, atomic nuclei constantly spin in magnetic fields. Small errors in those spins can blur the resulting images. The new insight could help engineers design sequences that cleanly undo unwanted rotations.
Quantum devices, built around spinning qubits, might also benefit. Since qubits evolve through quantum rotations described by SU(2), a universal reset rule could help stabilize computations. “No matter how tangled the history of rotations,” Tlusty said in the UNIST press release, “there exists a simple recipe: rescale the driving force and apply it twice.”
And in robotics, the principle might enable machines that can roll or pivot endlessly without drifting off course. “Imagine if we had a robot that could morph between any solid body shape, it could then follow any desired path simply through morphing of shape,” said Josie Hughes of the Swiss Federal Institute of Technology Lausanne in an interview with New Scientist.
As Eckmann put it, the discovery shows “how rich mathematics can be even in a field as well-trod as the study of rotations.” It’s a rare kind of elegance: a universal law that hides in plain sight, waiting for someone to give the world a gentle twist — and then do it again.
The findings appeared in the Physical Review Letters.
First Appeared on
Source link


{kind=link}